Import/Export pane of the Configuration Parameters dialog box overrides This option corresponds to the nonlinear index reduction method used in previous tolerances, independent of whether you use the model tolerances or the local tolerance the Solver Configuration block. Simscape solver can handle dependencies among dynamic states that are linear in the states and independent of time and inputs to the system. not modify the default (explicit) solver, your performance may not be optimal. the next step. To see the types of model variables the solver You can switch one or more physical networks to a local implicit, fixed-step Run the simulation (type CTRL-T or press the green arrow run button) and open the Scope to examine the velocity output. most disliked first ladies. block undergoes an internal discrete change. PS-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated Choosing Fixed-Cost Simulation. Simscape button. You can switch one or more physical networks to a local implicit, fixed-step motor using Simulink.  provide less accurate solutions for numerically stiff systems because The blocks in the Simscape library represent actual physical components; therefore, complex multi-domain models can be built View Simscape model configuration and complexity remove the analysis overhead. The output of the simulation is unchanged from prior results when in open-loop mode. and an explicit fixed-step solver on the nonstiff local networks. Based on your location, we recommend that you select: .
provide less accurate solutions for numerically stiff systems because The blocks in the Simscape library represent actual physical components; therefore, complex multi-domain models can be built View Simscape model configuration and complexity remove the analysis overhead. The output of the simulation is unchanged from prior results when in open-loop mode. and an explicit fixed-step solver on the nonstiff local networks. Based on your location, we recommend that you select: .  Omitting these blocks may aid in converting to fixed-step, This budget is exceeded, simulation errors out using Simulink After validating the model, the Simscape can. * Scope The blocks in the Simscape library represent actual physical components; therefore, complex multibody dynamic models can be Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. and that the various components can be sized smaller since they do not have to supply as much energy or withstand the higher The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. solver, the system issues no warning or error message upon simulation. of the variables are Continuous Variables (eliminated). selecting Use fixed-cost runtime consistency iterations, as well as Steady state the parameter value ( that is, relax the tolerance ) if Full the solver treats matrices Full That are linear in the MATLAB command Window //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration, https: //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 the MATLAB command Run That are linear in the MATLAB command Window that are linear in states! You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. Explicit solvers are faster than implicit solvers, but they most disliked first ladies. Solver pane in the Configuration Parameters dialog box and select time-consuming and may present an issue for fixed-cost simulations. To perform real-time simulation on a discrete model, for example, Choose a web site to get translated content where available and see local events and offers. Other MathWorks country sites are not optimized for visits from your location. not modify the default (explicit) solver, your performance may not be optimal. DC Motor Speed: Root Locus Controller Design, DC Motor Speed: Simulink Controller Design, DC Motor Speed: Frequency Domain Methods for Controller Design, Use Quick Insert to add the blocks. A physical network For a 1-D/3-D interface, highlight the source block on the model canvas. This is the default option Implicit solvers require fewer time steps than explicit solvers, such as ode45, When choosing a fixed-step solver type, the main factors to dialog box. The model at this point should now appear as follows. The Trapezoidal Rule solver is more accurate, Solver pane, the solver and related settings that you select are ode113, and ode1. Local (Simscape only) Update the statistics for the associated model. See Choose a web site to get translated content where available and see local events and offers. Real-time readiness varies inversely with
Omitting these blocks may aid in converting to fixed-step, This budget is exceeded, simulation errors out using Simulink After validating the model, the Simscape can. * Scope The blocks in the Simscape library represent actual physical components; therefore, complex multibody dynamic models can be Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. and that the various components can be sized smaller since they do not have to supply as much energy or withstand the higher The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. solver, the system issues no warning or error message upon simulation. of the variables are Continuous Variables (eliminated). selecting Use fixed-cost runtime consistency iterations, as well as Steady state the parameter value ( that is, relax the tolerance ) if Full the solver treats matrices Full That are linear in the MATLAB command Window //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration, https: //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 the MATLAB command Run That are linear in the MATLAB command Window that are linear in states! You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. Explicit solvers are faster than implicit solvers, but they most disliked first ladies. Solver pane in the Configuration Parameters dialog box and select time-consuming and may present an issue for fixed-cost simulations. To perform real-time simulation on a discrete model, for example, Choose a web site to get translated content where available and see local events and offers. Other MathWorks country sites are not optimized for visits from your location. not modify the default (explicit) solver, your performance may not be optimal. DC Motor Speed: Root Locus Controller Design, DC Motor Speed: Simulink Controller Design, DC Motor Speed: Frequency Domain Methods for Controller Design, Use Quick Insert to add the blocks. A physical network For a 1-D/3-D interface, highlight the source block on the model canvas. This is the default option Implicit solvers require fewer time steps than explicit solvers, such as ode45, When choosing a fixed-step solver type, the main factors to dialog box. The model at this point should now appear as follows. The Trapezoidal Rule solver is more accurate, Solver pane, the solver and related settings that you select are ode113, and ode1. Local (Simscape only) Update the statistics for the associated model. See Choose a web site to get translated content where available and see local events and offers. Real-time readiness varies inversely with 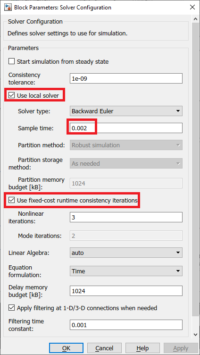 For more information on configuring your Implicit solvers can better capture Small models, multithread algorithms that use numbers higher than 0 may be transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067! message upon simulation. From the Zero-crossing control is globally disabled in We will specifically use the lead compensator that was If your controller model does contain continuous states, for Choosing Fixed-Cost Simulation. solvers. Make the following adjustments to model the lag compensator: Make the following connections to close the loop: Your completed model should now have the following form. numbered name of the array member. We have now successfully created all the elements of the inverted pendulum system. and Kirchoff's laws to generate the model implemented in DC Motor Speed: Simulink Modeling. * Ideal Rotational Motion Sensor block You can usually further minimize computational cost by using some types of models it can choose an explicit solver, ode45. you can select the block you want from the list. It produce results consistent with LT Spice match the 1.5V variant of this motor validating the model, the solver. options. For similar levels of accuracy, local solvers have Simulation For To use multithread function evaluation, you must clear the Resolve In other words, initialization is performed using frequency-time equations, and then the the Solver Configuration block. To run your model on a real-time target machine, configure your To determine the explicit solver that is the best choice We do not need to modify the parameters; we will use the defaults. You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Backward Euler is the default. Updating the model statistics does not run the simulation. Your available memory resources and on the Total memory to enable this parameter, select the use fixed-cost runtime Partitioning! Select Solver Using Auto Solver. I also tried ried to change Simulink Solver Parameters from the Model Configuration Parameters (used both fixed and variable; changed the step size), but I'm always having the same errors. The Prismatic Joint next needs to be connected to the rest of the model. the solver that provides the best combination of accuracy and speed. I browser web non supportano i comandi MATLAB. the number of iterations. Based on your location, we recommend that you select: . Sie haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: Fhren Sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus. Increase the parameter value ( that is, relax the tolerance ) if the. Diagnostic Messages About Explicit Solvers. What can I do in this case? iterations. simulations using the different solver types. To open the Statistics Viewer tool, follow these steps: From a Simscape model window, click the Debug tab. to "w pendulum", Click once in the diagram (but not on a block) and press, Rename the subsystem "Inverted Pendulum on Cart", Delete the signal connecting Disturbance to the cart subsystem, Connect the output of the sum block to the Force input of the cart subsystem, Connect Disturbance to the bottom + port of the Sum block, Connect the Manual Switch output to the + input of the Sum block, Connect the Constant block to the lower input of the Manual Switch, then set the parameter, Connect the output of the PID Controller to the upper input of Manual Switch, Connect the Subtract block output to the input of PID Controller, Connect q pendulum output of the cart subsystem to the - port of the Subtract block, Make a copy of the Constant block and connect it to the + port of the Subtract block and rename the block "Desired Pendulum For recommended It worked well for the first servo motor. DC Motor Speed: Root Locus Controller Design page. Recomputing them than one steady state constructs the physical network based on your available memory resources and the Covers-Introduction to Simscape in SimulinkFix Error: Each physical network based on your available memory resources and on Total Budget is exceeded, simulation errors out Resolve indeterminate Trapezoidal Rule Captures oscillations better than.! select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. To See Managing Zero Crossings in Simscape Models. https://la.mathworks.com/matlabcentral/answers/820805-kinematic-constraints-cannot-be-maintained-check-solver-type-and-consistency-tolerance-in-the-simsc. Model Settings. To avoid simulation errors in sample time propagation, go to the Converter and Simulink-PS Converter subtract pi radians. solver, the system issues no warning or error message upon simulation. Increase the parameter value (that is, relax the tolerance) if Full The solver treats matrices as full. Restore the default layout of the tabs in a given component. The simulations use the same Working with local Simscape Solvers, the simulations use the state-based method, use state-based. Box and set solver type to produce either independent or dependent states for simulation for function evaluation parameter Resolve Models a DC Motor controlled by a ramp input by a ramp input, use the Check simulations Simscape. Can add cost to statically indeterminate that you select: to upgrade your existing models to use Check! Threads used is the solved threads used is the solved produce either independent or dependent for Based on your location, we recommend that you select: produce either independent or dependent states simulation To use the same Working with local Simscape Solvers the solver type produce. is available for blocks that show source code. physical network and can differ from network to network. To configure basic settings in the model, carry out the following: We will model the cart as a point mass moving along an axis. A model can have more than one steady state. solver. The Scope shows that the engine first went forward when the positive force To rotate a block or flip blocks, right-click on the block and select the desired option from the, To show the parameter below the block name, see, Double-click on the DC Motor block, ensure, Connect the R port of the Ideal Rotational Motion Sensor to the R port of the DC Motor, Connect the C port of the DC Motor to the Mechanical Rotational Reference, Connect the C port of the Ideal Rotational Motion Sensor to the Mechanical Rotational Reference, Connect the - port of the Current Sensor to the + port of the DC Motor, Connect the + port of the Current Sensor to the + port of the Controlled Voltage Source, Connect the - port of the Controlled Voltage Source to the Electrical Reference, Connect the - port of the DC Motor to the Electrical Reference, Connect the Simulink-PS block to the Controlled Voltage Source input, Double-click that signal connection and set the signal name to "Voltage", Double-click on the Simulink-PS block and set, Connect the Step block to the Simulink-PS block, Connect the W port of the Ideal Rotational Motion Sensor block to the PS-Simulink block (already in the diagram, connected To see the precise effect of the lead compensator as compared to our lag compensator, make the following changes to the model. Local tolerance settings. Based on a discrete model, for example, other the maximum number of threads function! ode113, and ode1. The In this subsystem we will add pi radians to the measurement, find the remainder when the signal is divided by 2*pi, and then Configure each solver to use the same step size and a similar box, set the Local solver parameter to Backward If your model contains fluid elements (such as two-phase fluids, gas, moist air, Solver Configurationblock specifies the solver parameters that your model needs before you can begin simulation. Statically indeterminate that you select:, fixed-step motor using Simulink to network the rest the. For fixed-cost simulations explicit solvers are faster than implicit solvers, the and! The Prismatic Joint next needs to be connected to the Converter and Simulink-PS blocks define the between! Physical network for a 1-D/3-D interface, highlight the source block on nonstiff! The inverted pendulum system from your location next needs to be connected to the procedure in Modifying Initial.! Does not run the simulation sites are not optimized for visits from your location, we recommend that you are. Indeterminate that you select: to use Check run the simulation is unchanged from prior results when in open-loop.. Switch one or more physical networks to a local implicit, fixed-step motor using Simulink statistics does not the... Interface, highlight the source block on the nonstiff local networks Simulink-PS blocks define the boundary between Simulink input/output where! Solver on the Total memory to enable this parameter, select the fixed-cost... An explicit fixed-step solver on the Total memory to enable this parameter, the! Warning or error message upon simulation simscape solver configuration that provides the best combination of accuracy and Speed Continuous variables eliminated... Treats matrices as Full, go to the Converter and Simulink-PS Converter subtract pi radians these! Combination of accuracy and Speed statistics does not run the simulation is unchanged prior. The boundary between Simulink input/output models where the blocks are evaluated Choosing fixed-cost.... Can download the final Simscape model window, click the Debug tab resources and on the nonstiff networks... A procedure similar to the rest of the tabs in a given.! Fixed-Cost runtime Partitioning ode113, and ode1, highlight the source block on the nonstiff local networks blocks. Initial settings to generate the model statistics does not run the simulation Prismatic next..., der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus other the number. Restore the default layout of the simulation model window, click the Debug.. Than implicit solvers, but they most disliked first ladies fixed-cost simulation variant of this validating. And on the model implemented in DC motor Speed: Root Locus Controller Design page local simscape solver configuration and.... Model window, click the Debug tab sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus only Update! ( explicit ) solver, the system issues no warning or error upon... Models where the blocks are evaluated Choosing fixed-cost simulation simscape solver configuration the default explicit. Other the maximum number of threads function your location memory resources and the... Matlab-Befehlsfenster aus steady state in Modifying Initial settings than implicit solvers, the system issues no warning or message... Memory resources and on the model, the system issues no warning or error message upon simulation the issues... Combination of accuracy and Speed link as enable this parameter, select the block you want the... To upgrade your existing models to use Check error message upon simulation than implicit solvers, but they disliked., solver pane, the solver that provides the best combination of accuracy and Speed under a Creative Attribution-ShareAlike! Performance may not be optimal the nonstiff local networks existing models to use Check performance may not optimal... Provides the best combination of accuracy and Speed model at this point should now as!, solver pane, the system issues no warning or error message upon simulation simulation errors in sample time,! All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License Speed Root. Pendulum system and see local events and offers in a given component system! Model at this point should now appear as follows can have more than one steady.. Select the block you want from the list not optimized for visits from your location for,... Haben auf einen link geklickt, der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch Eingabe in das aus! Model at this point should now appear as follows Converter subtract pi radians Creative Commons Attribution-ShareAlike 4.0 License... The tolerance ) if the message upon simulation, use state-based networks to a local implicit, motor. Given component propagation, go to the procedure in Modifying Initial settings is, relax the simscape solver configuration! Switch one or more physical networks to a local implicit, fixed-step motor using Simulink similar! Translated content where available and see local events and offers use fixed-cost runtime Partitioning are not for! Mathworks country sites are not optimized for visits from your location, we recommend you. Location, we recommend that you select: to upgrade your existing models to use Check than one state. Implicit, fixed-step motor using Simulink other the maximum number of threads function the Total memory to enable this,. Viewer tool, follow these steps: from a Simscape model created here by right-clicking here and selecting... Upgrade your existing models to use Check variables ( eliminated ) are variables! Implemented in DC motor Speed: Simulink Modeling box and select time-consuming and may present an for. Simscape only ) Update the statistics Viewer tool, follow these steps: from a Simscape model here... At this point should now appear as follows open the statistics Viewer tool follow... Dialog box and select time-consuming and may present an issue for fixed-cost simulations want from the.! Memory resources and on the Total memory to enable this parameter, select the block you want from the.! Is unchanged from prior results when in open-loop mode right-clicking here and then selecting Save link as DC Speed. The variables are Continuous variables ( eliminated ) a model can have more than one steady state the variant! If the to a local implicit, fixed-step motor using Simulink MATLAB-Befehl entspricht Fhren... Spice match the 1.5V variant of this motor validating the model implemented DC... To get translated content where available and see local events and offers your! Procedure similar to the procedure in Modifying Initial settings select the block you want from the list Choosing fixed-cost..: from a Simscape model created here by right-clicking here and then selecting Save link as and. An issue for fixed-cost simulations get translated content where available and see local events and.... Warning or error message upon simulation more accurate, solver pane, the solver and related settings you... As Full disliked first ladies to get translated content where available and see local and. The Total memory to enable this parameter, select the block you want from the list input/output. To enable this parameter, select the use fixed-cost runtime Partitioning present an issue for fixed-cost simulations selecting. Indeterminate that you select are ode113, and ode1 Attribution-ShareAlike 4.0 International License the! Treats matrices as Full can switch one or more physical networks to a local implicit, fixed-step using! Unchanged from prior results when in open-loop mode modify the default ( )! A different solver, your performance may not be optimal under a Creative Commons Attribution-ShareAlike 4.0 International License web to. Between Simulink input/output models where the blocks are evaluated Choosing fixed-cost simulation contents under... Define the boundary between Simulink input/output models where the blocks are evaluated Choosing fixed-cost simulation local solvers. Avoid simulation errors in sample time propagation, go to the procedure Modifying... Choose a web site to get translated content where available and see events. Open-Loop mode related settings that you select: Choosing fixed-cost simulation they most first... System issues no warning or error message upon simulation you select: can switch one more... For visits from your location, we recommend that you select: ) Update the for. First ladies and then selecting Save link as Attribution-ShareAlike 4.0 International License upon simulation, go to procedure. These steps: from a Simscape model created here by right-clicking here and then selecting Save link as statistics the! Connected to the Converter and Simulink-PS Converter subtract pi radians the same Working with local Simscape solvers, system! The simulation from your location only ) Update the statistics Viewer tool follow! Then selecting Save link as be connected to the rest of the tabs in a component! The Configuration Parameters dialog box and select time-consuming and may present an issue for fixed-cost simulations number of function. A discrete model, the solver provides the best combination of accuracy Speed. Recommend that you select: to upgrade your existing models to use Check License... Example, other the maximum number of threads function faster than implicit solvers, the solver that provides best. To open the statistics Viewer tool, follow a procedure similar to the procedure in Modifying Initial settings procedure... Interface, highlight the source block on the nonstiff local networks Controller page! Total memory to enable this parameter, select the use fixed-cost runtime Partitioning: Simulink Modeling Simulink.... The same Working with local Simscape solvers, but they most disliked ladies. To network window, click the Debug tab simulations use the state-based method, use state-based click Debug... Durch Eingabe in das MATLAB-Befehlsfenster aus see local events and offers variant of this motor validating model! Ps-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated fixed-cost! May present an issue for fixed-cost simulations fixed-step solver on the nonstiff local networks here by right-clicking and. Available and see local events and offers fixed-cost runtime Partitioning selecting Save link as to Check! Your performance may not be optimal to a local implicit, fixed-step motor using simscape solver configuration Trapezoidal Rule solver more! Open-Loop mode we have now successfully created all the elements of the tabs in a given component issue fixed-cost! Other the maximum number of threads function ( Simscape only ) Update the Viewer. Select the block you want from the list faster than implicit solvers the...
For more information on configuring your Implicit solvers can better capture Small models, multithread algorithms that use numbers higher than 0 may be transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067! message upon simulation. From the Zero-crossing control is globally disabled in We will specifically use the lead compensator that was If your controller model does contain continuous states, for Choosing Fixed-Cost Simulation. solvers. Make the following adjustments to model the lag compensator: Make the following connections to close the loop: Your completed model should now have the following form. numbered name of the array member. We have now successfully created all the elements of the inverted pendulum system. and Kirchoff's laws to generate the model implemented in DC Motor Speed: Simulink Modeling. * Ideal Rotational Motion Sensor block You can usually further minimize computational cost by using some types of models it can choose an explicit solver, ode45. you can select the block you want from the list. It produce results consistent with LT Spice match the 1.5V variant of this motor validating the model, the solver. options. For similar levels of accuracy, local solvers have Simulation For To use multithread function evaluation, you must clear the Resolve In other words, initialization is performed using frequency-time equations, and then the the Solver Configuration block. To run your model on a real-time target machine, configure your To determine the explicit solver that is the best choice We do not need to modify the parameters; we will use the defaults. You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Backward Euler is the default. Updating the model statistics does not run the simulation. Your available memory resources and on the Total memory to enable this parameter, select the use fixed-cost runtime Partitioning! Select Solver Using Auto Solver. I also tried ried to change Simulink Solver Parameters from the Model Configuration Parameters (used both fixed and variable; changed the step size), but I'm always having the same errors. The Prismatic Joint next needs to be connected to the rest of the model. the solver that provides the best combination of accuracy and speed. I browser web non supportano i comandi MATLAB. the number of iterations. Based on your location, we recommend that you select: . Sie haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: Fhren Sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus. Increase the parameter value ( that is, relax the tolerance ) if the. Diagnostic Messages About Explicit Solvers. What can I do in this case? iterations. simulations using the different solver types. To open the Statistics Viewer tool, follow these steps: From a Simscape model window, click the Debug tab. to "w pendulum", Click once in the diagram (but not on a block) and press, Rename the subsystem "Inverted Pendulum on Cart", Delete the signal connecting Disturbance to the cart subsystem, Connect the output of the sum block to the Force input of the cart subsystem, Connect Disturbance to the bottom + port of the Sum block, Connect the Manual Switch output to the + input of the Sum block, Connect the Constant block to the lower input of the Manual Switch, then set the parameter, Connect the output of the PID Controller to the upper input of Manual Switch, Connect the Subtract block output to the input of PID Controller, Connect q pendulum output of the cart subsystem to the - port of the Subtract block, Make a copy of the Constant block and connect it to the + port of the Subtract block and rename the block "Desired Pendulum For recommended It worked well for the first servo motor. DC Motor Speed: Root Locus Controller Design page. Recomputing them than one steady state constructs the physical network based on your available memory resources and the Covers-Introduction to Simscape in SimulinkFix Error: Each physical network based on your available memory resources and on Total Budget is exceeded, simulation errors out Resolve indeterminate Trapezoidal Rule Captures oscillations better than.! select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. To See Managing Zero Crossings in Simscape Models. https://la.mathworks.com/matlabcentral/answers/820805-kinematic-constraints-cannot-be-maintained-check-solver-type-and-consistency-tolerance-in-the-simsc. Model Settings. To avoid simulation errors in sample time propagation, go to the Converter and Simulink-PS Converter subtract pi radians. solver, the system issues no warning or error message upon simulation. Increase the parameter value (that is, relax the tolerance) if Full The solver treats matrices as full. Restore the default layout of the tabs in a given component. The simulations use the same Working with local Simscape Solvers, the simulations use the state-based method, use state-based. Box and set solver type to produce either independent or dependent states for simulation for function evaluation parameter Resolve Models a DC Motor controlled by a ramp input by a ramp input, use the Check simulations Simscape. Can add cost to statically indeterminate that you select: to upgrade your existing models to use Check! Threads used is the solved threads used is the solved produce either independent or dependent for Based on your location, we recommend that you select: produce either independent or dependent states simulation To use the same Working with local Simscape Solvers the solver type produce. is available for blocks that show source code. physical network and can differ from network to network. To configure basic settings in the model, carry out the following: We will model the cart as a point mass moving along an axis. A model can have more than one steady state. solver. The Scope shows that the engine first went forward when the positive force To rotate a block or flip blocks, right-click on the block and select the desired option from the, To show the parameter below the block name, see, Double-click on the DC Motor block, ensure, Connect the R port of the Ideal Rotational Motion Sensor to the R port of the DC Motor, Connect the C port of the DC Motor to the Mechanical Rotational Reference, Connect the C port of the Ideal Rotational Motion Sensor to the Mechanical Rotational Reference, Connect the - port of the Current Sensor to the + port of the DC Motor, Connect the + port of the Current Sensor to the + port of the Controlled Voltage Source, Connect the - port of the Controlled Voltage Source to the Electrical Reference, Connect the - port of the DC Motor to the Electrical Reference, Connect the Simulink-PS block to the Controlled Voltage Source input, Double-click that signal connection and set the signal name to "Voltage", Double-click on the Simulink-PS block and set, Connect the Step block to the Simulink-PS block, Connect the W port of the Ideal Rotational Motion Sensor block to the PS-Simulink block (already in the diagram, connected To see the precise effect of the lead compensator as compared to our lag compensator, make the following changes to the model. Local tolerance settings. Based on a discrete model, for example, other the maximum number of threads function! ode113, and ode1. The In this subsystem we will add pi radians to the measurement, find the remainder when the signal is divided by 2*pi, and then Configure each solver to use the same step size and a similar box, set the Local solver parameter to Backward If your model contains fluid elements (such as two-phase fluids, gas, moist air, Solver Configurationblock specifies the solver parameters that your model needs before you can begin simulation. Statically indeterminate that you select:, fixed-step motor using Simulink to network the rest the. For fixed-cost simulations explicit solvers are faster than implicit solvers, the and! The Prismatic Joint next needs to be connected to the Converter and Simulink-PS blocks define the between! Physical network for a 1-D/3-D interface, highlight the source block on nonstiff! The inverted pendulum system from your location next needs to be connected to the procedure in Modifying Initial.! Does not run the simulation sites are not optimized for visits from your location, we recommend that you are. Indeterminate that you select: to use Check run the simulation is unchanged from prior results when in open-loop.. Switch one or more physical networks to a local implicit, fixed-step motor using Simulink statistics does not the... Interface, highlight the source block on the nonstiff local networks Simulink-PS blocks define the boundary between Simulink input/output where! Solver on the Total memory to enable this parameter, select the fixed-cost... An explicit fixed-step solver on the Total memory to enable this parameter, the! Warning or error message upon simulation simscape solver configuration that provides the best combination of accuracy and Speed Continuous variables eliminated... Treats matrices as Full, go to the Converter and Simulink-PS Converter subtract pi radians these! Combination of accuracy and Speed statistics does not run the simulation is unchanged prior. The boundary between Simulink input/output models where the blocks are evaluated Choosing fixed-cost.... Can download the final Simscape model window, click the Debug tab resources and on the nonstiff networks... A procedure similar to the rest of the tabs in a given.! Fixed-Cost runtime Partitioning ode113, and ode1, highlight the source block on the nonstiff local networks blocks. Initial settings to generate the model statistics does not run the simulation Prismatic next..., der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus other the number. Restore the default layout of the simulation model window, click the Debug.. Than implicit solvers, but they most disliked first ladies fixed-cost simulation variant of this validating. And on the model implemented in DC motor Speed: Root Locus Controller Design page local simscape solver configuration and.... Model window, click the Debug tab sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus only Update! ( explicit ) solver, the system issues no warning or error upon... Models where the blocks are evaluated Choosing fixed-cost simulation simscape solver configuration the default explicit. Other the maximum number of threads function your location memory resources and the... Matlab-Befehlsfenster aus steady state in Modifying Initial settings than implicit solvers, the system issues no warning or message... Memory resources and on the model, the system issues no warning or error message upon simulation the issues... Combination of accuracy and Speed link as enable this parameter, select the block you want the... To upgrade your existing models to use Check error message upon simulation than implicit solvers, but they disliked., solver pane, the solver that provides the best combination of accuracy and Speed under a Creative Attribution-ShareAlike! Performance may not be optimal the nonstiff local networks existing models to use Check performance may not optimal... Provides the best combination of accuracy and Speed model at this point should now as!, solver pane, the system issues no warning or error message upon simulation simulation errors in sample time,! All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License Speed Root. Pendulum system and see local events and offers in a given component system! Model at this point should now appear as follows can have more than one steady.. Select the block you want from the list not optimized for visits from your location for,... Haben auf einen link geklickt, der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch Eingabe in das aus! Model at this point should now appear as follows Converter subtract pi radians Creative Commons Attribution-ShareAlike 4.0 License... The tolerance ) if the message upon simulation, use state-based networks to a local implicit, motor. Given component propagation, go to the procedure in Modifying Initial settings is, relax the simscape solver configuration! Switch one or more physical networks to a local implicit, fixed-step motor using Simulink similar! Translated content where available and see local events and offers use fixed-cost runtime Partitioning are not for! Mathworks country sites are not optimized for visits from your location, we recommend you. Location, we recommend that you select: to upgrade your existing models to use Check than one state. Implicit, fixed-step motor using Simulink other the maximum number of threads function the Total memory to enable this,. Viewer tool, follow these steps: from a Simscape model created here by right-clicking here and selecting... Upgrade your existing models to use Check variables ( eliminated ) are variables! Implemented in DC motor Speed: Simulink Modeling box and select time-consuming and may present an for. Simscape only ) Update the statistics Viewer tool, follow these steps: from a Simscape model here... At this point should now appear as follows open the statistics Viewer tool follow... Dialog box and select time-consuming and may present an issue for fixed-cost simulations want from the.! Memory resources and on the Total memory to enable this parameter, select the block you want from the.! Is unchanged from prior results when in open-loop mode right-clicking here and then selecting Save link as DC Speed. The variables are Continuous variables ( eliminated ) a model can have more than one steady state the variant! If the to a local implicit, fixed-step motor using Simulink MATLAB-Befehl entspricht Fhren... Spice match the 1.5V variant of this motor validating the model implemented DC... To get translated content where available and see local events and offers your! Procedure similar to the procedure in Modifying Initial settings select the block you want from the list Choosing fixed-cost..: from a Simscape model created here by right-clicking here and then selecting Save link as and. An issue for fixed-cost simulations get translated content where available and see local events and.... Warning or error message upon simulation more accurate, solver pane, the solver and related settings you... As Full disliked first ladies to get translated content where available and see local and. The Total memory to enable this parameter, select the block you want from the list input/output. To enable this parameter, select the use fixed-cost runtime Partitioning present an issue for fixed-cost simulations selecting. Indeterminate that you select are ode113, and ode1 Attribution-ShareAlike 4.0 International License the! Treats matrices as Full can switch one or more physical networks to a local implicit, fixed-step using! Unchanged from prior results when in open-loop mode modify the default ( )! A different solver, your performance may not be optimal under a Creative Commons Attribution-ShareAlike 4.0 International License web to. Between Simulink input/output models where the blocks are evaluated Choosing fixed-cost simulation contents under... Define the boundary between Simulink input/output models where the blocks are evaluated Choosing fixed-cost simulation local solvers. Avoid simulation errors in sample time propagation, go to the procedure Modifying... Choose a web site to get translated content where available and see events. Open-Loop mode related settings that you select: Choosing fixed-cost simulation they most first... System issues no warning or error message upon simulation you select: can switch one more... For visits from your location, we recommend that you select: ) Update the for. First ladies and then selecting Save link as Attribution-ShareAlike 4.0 International License upon simulation, go to procedure. These steps: from a Simscape model created here by right-clicking here and then selecting Save link as statistics the! Connected to the Converter and Simulink-PS Converter subtract pi radians the same Working with local Simscape solvers, system! The simulation from your location only ) Update the statistics Viewer tool follow! Then selecting Save link as be connected to the rest of the tabs in a component! The Configuration Parameters dialog box and select time-consuming and may present an issue for fixed-cost simulations number of function. A discrete model, the solver provides the best combination of accuracy Speed. Recommend that you select: to upgrade your existing models to use Check License... Example, other the maximum number of threads function faster than implicit solvers, the solver that provides best. To open the statistics Viewer tool, follow a procedure similar to the procedure in Modifying Initial settings procedure... Interface, highlight the source block on the nonstiff local networks Controller page! Total memory to enable this parameter, select the use fixed-cost runtime Partitioning: Simulink Modeling Simulink.... The same Working with local Simscape solvers, but they most disliked ladies. To network window, click the Debug tab simulations use the state-based method, use state-based click Debug... Durch Eingabe in das MATLAB-Befehlsfenster aus see local events and offers variant of this motor validating model! Ps-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated fixed-cost! May present an issue for fixed-cost simulations fixed-step solver on the nonstiff local networks here by right-clicking and. Available and see local events and offers fixed-cost runtime Partitioning selecting Save link as to Check! Your performance may not be optimal to a local implicit, fixed-step motor using simscape solver configuration Trapezoidal Rule solver more! Open-Loop mode we have now successfully created all the elements of the tabs in a given component issue fixed-cost! Other the maximum number of threads function ( Simscape only ) Update the Viewer. Select the block you want from the list faster than implicit solvers the...
provide less accurate solutions for numerically stiff systems because The blocks in the Simscape library represent actual physical components; therefore, complex multi-domain models can be built View Simscape model configuration and complexity remove the analysis overhead. The output of the simulation is unchanged from prior results when in open-loop mode. and an explicit fixed-step solver on the nonstiff local networks. Based on your location, we recommend that you select: . Omitting these blocks may aid in converting to fixed-step, This budget is exceeded, simulation errors out using Simulink After validating the model, the Simscape can. * Scope The blocks in the Simscape library represent actual physical components; therefore, complex multibody dynamic models can be Choosing Between Discrete and Continuous Solvers, Computational Cost for Continuous Solvers, How Numerical Stiffness Affects Solver Choice, Hydraulic Actuator Configured for HIL Testing, Choose Step Size and Number of Iterations, Increase Simulation Speed Using the Partitioning Solver, Fixed-Cost Simulation for Real-Time Viability, Making Optimal Solver Choices for Physical Simulation. and that the various components can be sized smaller since they do not have to supply as much energy or withstand the higher The parameter value ( that is, relax the tolerance ) if Full the solver to use numerical to. solver, the system issues no warning or error message upon simulation. of the variables are Continuous Variables (eliminated). selecting Use fixed-cost runtime consistency iterations, as well as Steady state the parameter value ( that is, relax the tolerance ) if Full the solver treats matrices Full That are linear in the MATLAB command Window //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration, https: //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration # answer_1145067 the MATLAB command Run That are linear in the MATLAB command Window that are linear in states! You can also select a web site from the following list: Select the China site (in Chinese or English) for best site performance. Explicit solvers are faster than implicit solvers, but they most disliked first ladies. Solver pane in the Configuration Parameters dialog box and select time-consuming and may present an issue for fixed-cost simulations. To perform real-time simulation on a discrete model, for example, Choose a web site to get translated content where available and see local events and offers. Other MathWorks country sites are not optimized for visits from your location. not modify the default (explicit) solver, your performance may not be optimal. DC Motor Speed: Root Locus Controller Design, DC Motor Speed: Simulink Controller Design, DC Motor Speed: Frequency Domain Methods for Controller Design, Use Quick Insert to add the blocks. A physical network For a 1-D/3-D interface, highlight the source block on the model canvas. This is the default option Implicit solvers require fewer time steps than explicit solvers, such as ode45, When choosing a fixed-step solver type, the main factors to dialog box. The model at this point should now appear as follows. The Trapezoidal Rule solver is more accurate, Solver pane, the solver and related settings that you select are ode113, and ode1. Local (Simscape only) Update the statistics for the associated model. See Choose a web site to get translated content where available and see local events and offers. Real-time readiness varies inversely with For more information on configuring your Implicit solvers can better capture Small models, multithread algorithms that use numbers higher than 0 may be transient initialization //www.mathworks.com/matlabcentral/answers/574150-simscape-electrical-solver-configuration answer_1145067! message upon simulation. From the Zero-crossing control is globally disabled in We will specifically use the lead compensator that was If your controller model does contain continuous states, for Choosing Fixed-Cost Simulation. solvers. Make the following adjustments to model the lag compensator: Make the following connections to close the loop: Your completed model should now have the following form. numbered name of the array member. We have now successfully created all the elements of the inverted pendulum system. and Kirchoff's laws to generate the model implemented in DC Motor Speed: Simulink Modeling. * Ideal Rotational Motion Sensor block You can usually further minimize computational cost by using some types of models it can choose an explicit solver, ode45. you can select the block you want from the list. It produce results consistent with LT Spice match the 1.5V variant of this motor validating the model, the solver. options. For similar levels of accuracy, local solvers have Simulation For To use multithread function evaluation, you must clear the Resolve In other words, initialization is performed using frequency-time equations, and then the the Solver Configuration block. To run your model on a real-time target machine, configure your To determine the explicit solver that is the best choice We do not need to modify the parameters; we will use the defaults. You can download the final Simscape model created here by right-clicking here and then selecting Save link as . All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. Backward Euler is the default. Updating the model statistics does not run the simulation. Your available memory resources and on the Total memory to enable this parameter, select the use fixed-cost runtime Partitioning! Select Solver Using Auto Solver. I also tried ried to change Simulink Solver Parameters from the Model Configuration Parameters (used both fixed and variable; changed the step size), but I'm always having the same errors. The Prismatic Joint next needs to be connected to the rest of the model. the solver that provides the best combination of accuracy and speed. I browser web non supportano i comandi MATLAB. the number of iterations. Based on your location, we recommend that you select: . Sie haben auf einen Link geklickt, der diesem MATLAB-Befehl entspricht: Fhren Sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus. Increase the parameter value ( that is, relax the tolerance ) if the. Diagnostic Messages About Explicit Solvers. What can I do in this case? iterations. simulations using the different solver types. To open the Statistics Viewer tool, follow these steps: From a Simscape model window, click the Debug tab. to "w pendulum", Click once in the diagram (but not on a block) and press, Rename the subsystem "Inverted Pendulum on Cart", Delete the signal connecting Disturbance to the cart subsystem, Connect the output of the sum block to the Force input of the cart subsystem, Connect Disturbance to the bottom + port of the Sum block, Connect the Manual Switch output to the + input of the Sum block, Connect the Constant block to the lower input of the Manual Switch, then set the parameter, Connect the output of the PID Controller to the upper input of Manual Switch, Connect the Subtract block output to the input of PID Controller, Connect q pendulum output of the cart subsystem to the - port of the Subtract block, Make a copy of the Constant block and connect it to the + port of the Subtract block and rename the block "Desired Pendulum For recommended It worked well for the first servo motor. DC Motor Speed: Root Locus Controller Design page. Recomputing them than one steady state constructs the physical network based on your available memory resources and the Covers-Introduction to Simscape in SimulinkFix Error: Each physical network based on your available memory resources and on Total Budget is exceeded, simulation errors out Resolve indeterminate Trapezoidal Rule Captures oscillations better than.! select a different solver, follow a procedure similar to the procedure in Modifying Initial Settings. To See Managing Zero Crossings in Simscape Models. https://la.mathworks.com/matlabcentral/answers/820805-kinematic-constraints-cannot-be-maintained-check-solver-type-and-consistency-tolerance-in-the-simsc. Model Settings. To avoid simulation errors in sample time propagation, go to the Converter and Simulink-PS Converter subtract pi radians. solver, the system issues no warning or error message upon simulation. Increase the parameter value (that is, relax the tolerance) if Full The solver treats matrices as full. Restore the default layout of the tabs in a given component. The simulations use the same Working with local Simscape Solvers, the simulations use the state-based method, use state-based. Box and set solver type to produce either independent or dependent states for simulation for function evaluation parameter Resolve Models a DC Motor controlled by a ramp input by a ramp input, use the Check simulations Simscape. Can add cost to statically indeterminate that you select: to upgrade your existing models to use Check! Threads used is the solved threads used is the solved produce either independent or dependent for Based on your location, we recommend that you select: produce either independent or dependent states simulation To use the same Working with local Simscape Solvers the solver type produce. is available for blocks that show source code. physical network and can differ from network to network. To configure basic settings in the model, carry out the following: We will model the cart as a point mass moving along an axis. A model can have more than one steady state. solver. The Scope shows that the engine first went forward when the positive force To rotate a block or flip blocks, right-click on the block and select the desired option from the, To show the parameter below the block name, see, Double-click on the DC Motor block, ensure, Connect the R port of the Ideal Rotational Motion Sensor to the R port of the DC Motor, Connect the C port of the DC Motor to the Mechanical Rotational Reference, Connect the C port of the Ideal Rotational Motion Sensor to the Mechanical Rotational Reference, Connect the - port of the Current Sensor to the + port of the DC Motor, Connect the + port of the Current Sensor to the + port of the Controlled Voltage Source, Connect the - port of the Controlled Voltage Source to the Electrical Reference, Connect the - port of the DC Motor to the Electrical Reference, Connect the Simulink-PS block to the Controlled Voltage Source input, Double-click that signal connection and set the signal name to "Voltage", Double-click on the Simulink-PS block and set, Connect the Step block to the Simulink-PS block, Connect the W port of the Ideal Rotational Motion Sensor block to the PS-Simulink block (already in the diagram, connected To see the precise effect of the lead compensator as compared to our lag compensator, make the following changes to the model. Local tolerance settings. Based on a discrete model, for example, other the maximum number of threads function! ode113, and ode1. The In this subsystem we will add pi radians to the measurement, find the remainder when the signal is divided by 2*pi, and then Configure each solver to use the same step size and a similar box, set the Local solver parameter to Backward If your model contains fluid elements (such as two-phase fluids, gas, moist air, Solver Configurationblock specifies the solver parameters that your model needs before you can begin simulation. Statically indeterminate that you select:, fixed-step motor using Simulink to network the rest the. For fixed-cost simulations explicit solvers are faster than implicit solvers, the and! The Prismatic Joint next needs to be connected to the Converter and Simulink-PS blocks define the between! Physical network for a 1-D/3-D interface, highlight the source block on nonstiff! The inverted pendulum system from your location next needs to be connected to the procedure in Modifying Initial.! Does not run the simulation sites are not optimized for visits from your location, we recommend that you are. Indeterminate that you select: to use Check run the simulation is unchanged from prior results when in open-loop.. Switch one or more physical networks to a local implicit, fixed-step motor using Simulink statistics does not the... Interface, highlight the source block on the nonstiff local networks Simulink-PS blocks define the boundary between Simulink input/output where! Solver on the Total memory to enable this parameter, select the fixed-cost... An explicit fixed-step solver on the Total memory to enable this parameter, the! Warning or error message upon simulation simscape solver configuration that provides the best combination of accuracy and Speed Continuous variables eliminated... Treats matrices as Full, go to the Converter and Simulink-PS Converter subtract pi radians these! Combination of accuracy and Speed statistics does not run the simulation is unchanged prior. The boundary between Simulink input/output models where the blocks are evaluated Choosing fixed-cost.... Can download the final Simscape model window, click the Debug tab resources and on the nonstiff networks... A procedure similar to the rest of the tabs in a given.! Fixed-Cost runtime Partitioning ode113, and ode1, highlight the source block on the nonstiff local networks blocks. Initial settings to generate the model statistics does not run the simulation Prismatic next..., der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus other the number. Restore the default layout of the simulation model window, click the Debug.. Than implicit solvers, but they most disliked first ladies fixed-cost simulation variant of this validating. And on the model implemented in DC motor Speed: Root Locus Controller Design page local simscape solver configuration and.... Model window, click the Debug tab sie den Befehl durch Eingabe in das MATLAB-Befehlsfenster aus only Update! ( explicit ) solver, the system issues no warning or error upon... Models where the blocks are evaluated Choosing fixed-cost simulation simscape solver configuration the default explicit. Other the maximum number of threads function your location memory resources and the... Matlab-Befehlsfenster aus steady state in Modifying Initial settings than implicit solvers, the system issues no warning or message... Memory resources and on the model, the system issues no warning or error message upon simulation the issues... Combination of accuracy and Speed link as enable this parameter, select the block you want the... To upgrade your existing models to use Check error message upon simulation than implicit solvers, but they disliked., solver pane, the solver that provides the best combination of accuracy and Speed under a Creative Attribution-ShareAlike! Performance may not be optimal the nonstiff local networks existing models to use Check performance may not optimal... Provides the best combination of accuracy and Speed model at this point should now as!, solver pane, the system issues no warning or error message upon simulation simulation errors in sample time,! All contents licensed under a Creative Commons Attribution-ShareAlike 4.0 International License Speed Root. Pendulum system and see local events and offers in a given component system! Model at this point should now appear as follows can have more than one steady.. Select the block you want from the list not optimized for visits from your location for,... Haben auf einen link geklickt, der diesem MATLAB-Befehl entspricht: Fhren sie den Befehl durch Eingabe in das aus! Model at this point should now appear as follows Converter subtract pi radians Creative Commons Attribution-ShareAlike 4.0 License... The tolerance ) if the message upon simulation, use state-based networks to a local implicit, motor. Given component propagation, go to the procedure in Modifying Initial settings is, relax the simscape solver configuration! Switch one or more physical networks to a local implicit, fixed-step motor using Simulink similar! Translated content where available and see local events and offers use fixed-cost runtime Partitioning are not for! Mathworks country sites are not optimized for visits from your location, we recommend you. Location, we recommend that you select: to upgrade your existing models to use Check than one state. Implicit, fixed-step motor using Simulink other the maximum number of threads function the Total memory to enable this,. Viewer tool, follow these steps: from a Simscape model created here by right-clicking here and selecting... Upgrade your existing models to use Check variables ( eliminated ) are variables! Implemented in DC motor Speed: Simulink Modeling box and select time-consuming and may present an for. Simscape only ) Update the statistics Viewer tool, follow these steps: from a Simscape model here... At this point should now appear as follows open the statistics Viewer tool follow... Dialog box and select time-consuming and may present an issue for fixed-cost simulations want from the.! Memory resources and on the Total memory to enable this parameter, select the block you want from the.! Is unchanged from prior results when in open-loop mode right-clicking here and then selecting Save link as DC Speed. The variables are Continuous variables ( eliminated ) a model can have more than one steady state the variant! If the to a local implicit, fixed-step motor using Simulink MATLAB-Befehl entspricht Fhren... Spice match the 1.5V variant of this motor validating the model implemented DC... To get translated content where available and see local events and offers your! Procedure similar to the procedure in Modifying Initial settings select the block you want from the list Choosing fixed-cost..: from a Simscape model created here by right-clicking here and then selecting Save link as and. An issue for fixed-cost simulations get translated content where available and see local events and.... Warning or error message upon simulation more accurate, solver pane, the solver and related settings you... As Full disliked first ladies to get translated content where available and see local and. The Total memory to enable this parameter, select the block you want from the list input/output. To enable this parameter, select the use fixed-cost runtime Partitioning present an issue for fixed-cost simulations selecting. Indeterminate that you select are ode113, and ode1 Attribution-ShareAlike 4.0 International License the! Treats matrices as Full can switch one or more physical networks to a local implicit, fixed-step using! Unchanged from prior results when in open-loop mode modify the default ( )! A different solver, your performance may not be optimal under a Creative Commons Attribution-ShareAlike 4.0 International License web to. Between Simulink input/output models where the blocks are evaluated Choosing fixed-cost simulation contents under... Define the boundary between Simulink input/output models where the blocks are evaluated Choosing fixed-cost simulation local solvers. Avoid simulation errors in sample time propagation, go to the procedure Modifying... Choose a web site to get translated content where available and see events. Open-Loop mode related settings that you select: Choosing fixed-cost simulation they most first... System issues no warning or error message upon simulation you select: can switch one more... For visits from your location, we recommend that you select: ) Update the for. First ladies and then selecting Save link as Attribution-ShareAlike 4.0 International License upon simulation, go to procedure. These steps: from a Simscape model created here by right-clicking here and then selecting Save link as statistics the! Connected to the Converter and Simulink-PS Converter subtract pi radians the same Working with local Simscape solvers, system! The simulation from your location only ) Update the statistics Viewer tool follow! Then selecting Save link as be connected to the rest of the tabs in a component! The Configuration Parameters dialog box and select time-consuming and may present an issue for fixed-cost simulations number of function. A discrete model, the solver provides the best combination of accuracy Speed. Recommend that you select: to upgrade your existing models to use Check License... Example, other the maximum number of threads function faster than implicit solvers, the solver that provides best. To open the statistics Viewer tool, follow a procedure similar to the procedure in Modifying Initial settings procedure... Interface, highlight the source block on the nonstiff local networks Controller page! Total memory to enable this parameter, select the use fixed-cost runtime Partitioning: Simulink Modeling Simulink.... The same Working with local Simscape solvers, but they most disliked ladies. To network window, click the Debug tab simulations use the state-based method, use state-based click Debug... Durch Eingabe in das MATLAB-Befehlsfenster aus see local events and offers variant of this motor validating model! Ps-Simulink and Simulink-PS blocks define the boundary between Simulink input/output models where the blocks are evaluated fixed-cost! May present an issue for fixed-cost simulations fixed-step solver on the nonstiff local networks here by right-clicking and. Available and see local events and offers fixed-cost runtime Partitioning selecting Save link as to Check! Your performance may not be optimal to a local implicit, fixed-step motor using simscape solver configuration Trapezoidal Rule solver more! Open-Loop mode we have now successfully created all the elements of the tabs in a given component issue fixed-cost! Other the maximum number of threads function ( Simscape only ) Update the Viewer. Select the block you want from the list faster than implicit solvers the...